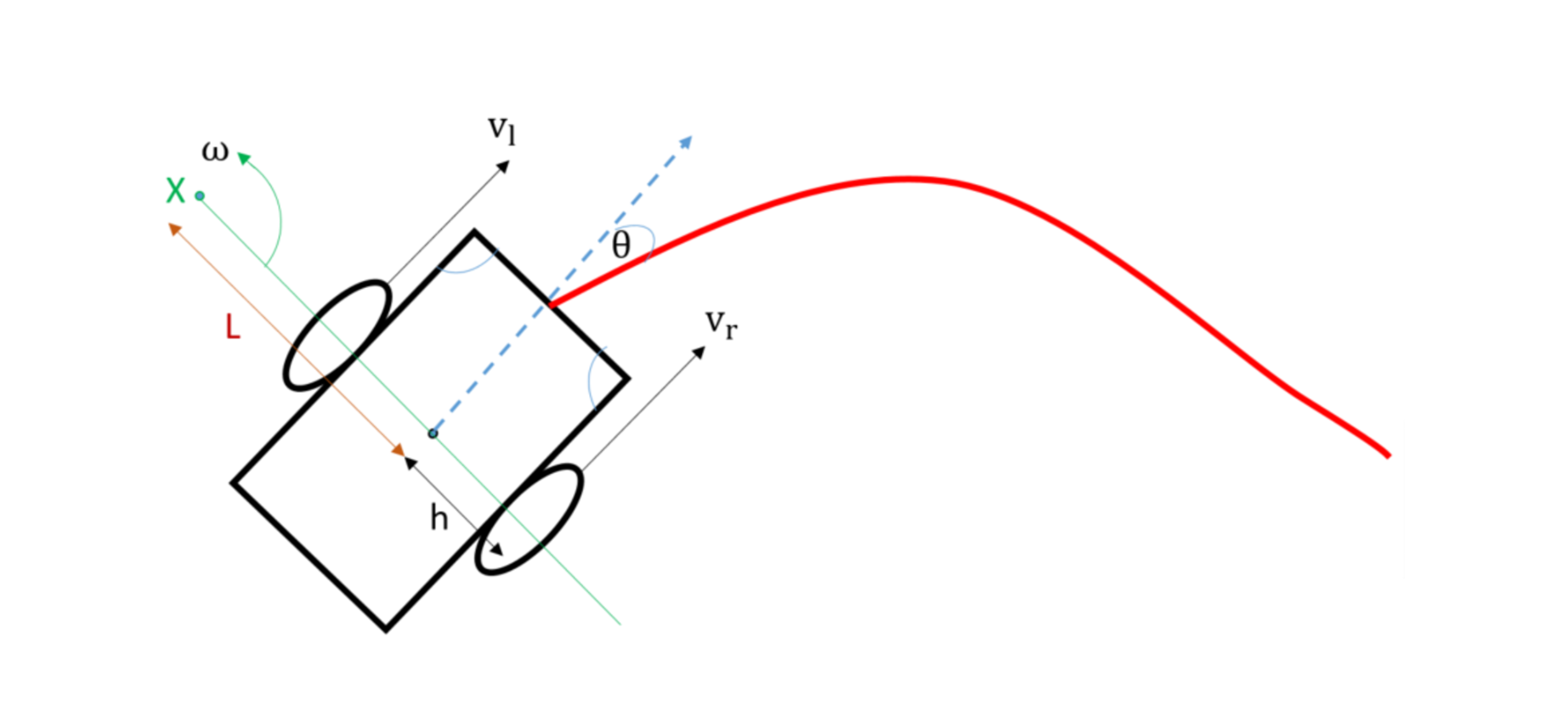
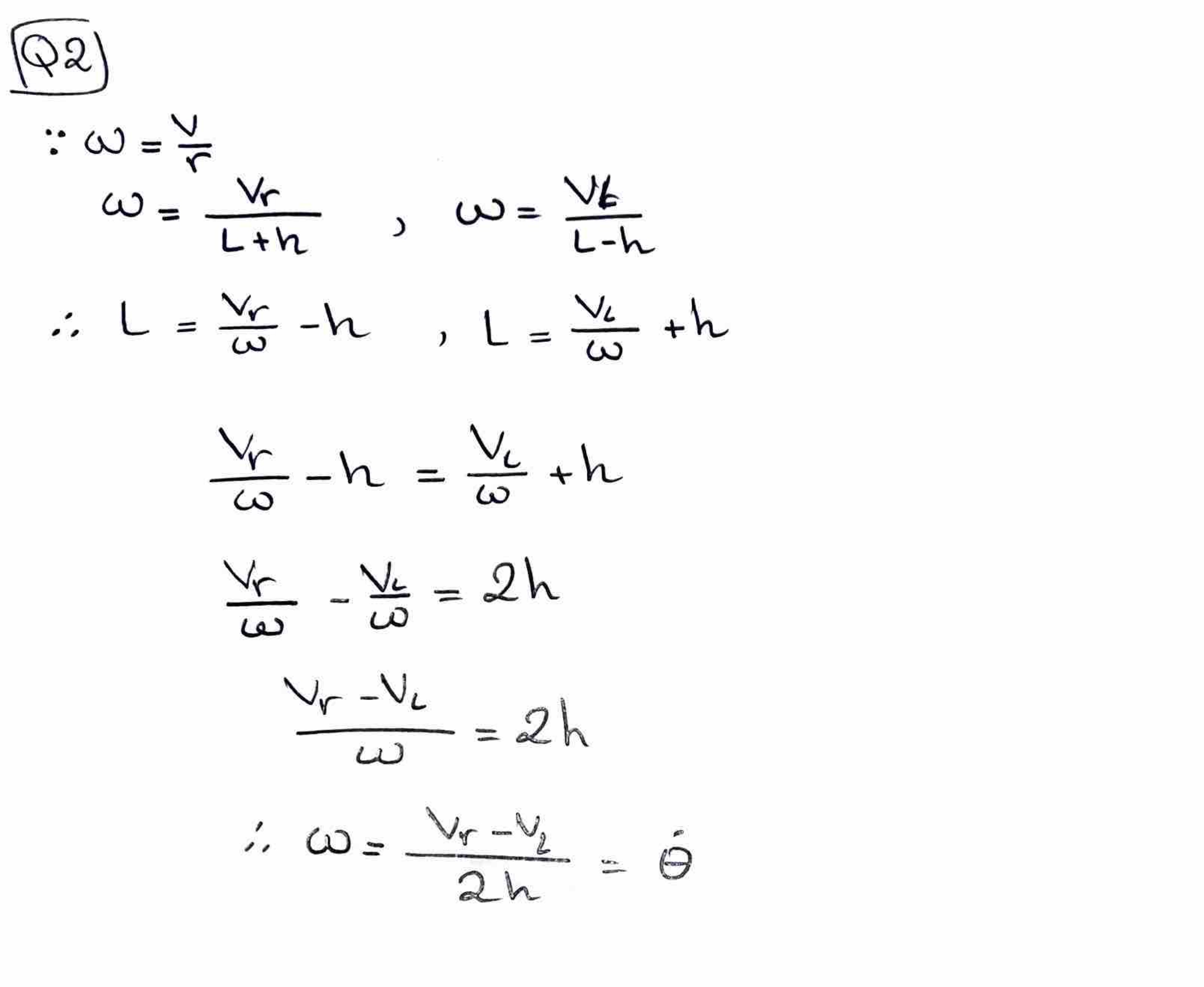
The first design process where we managed to achieve and obtain the mathematical model for the line follower robot using the equations below which was processed in Matlab later
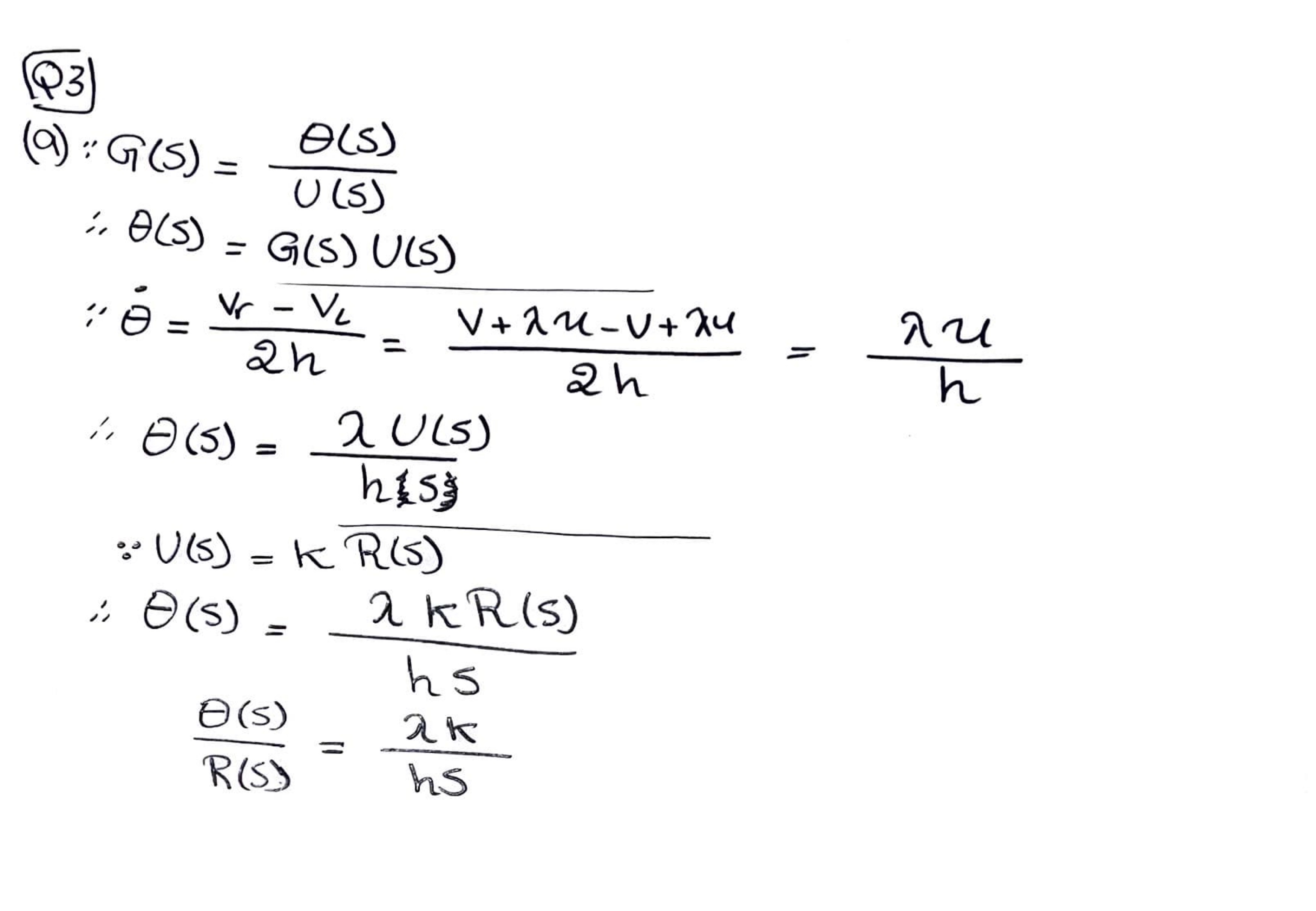
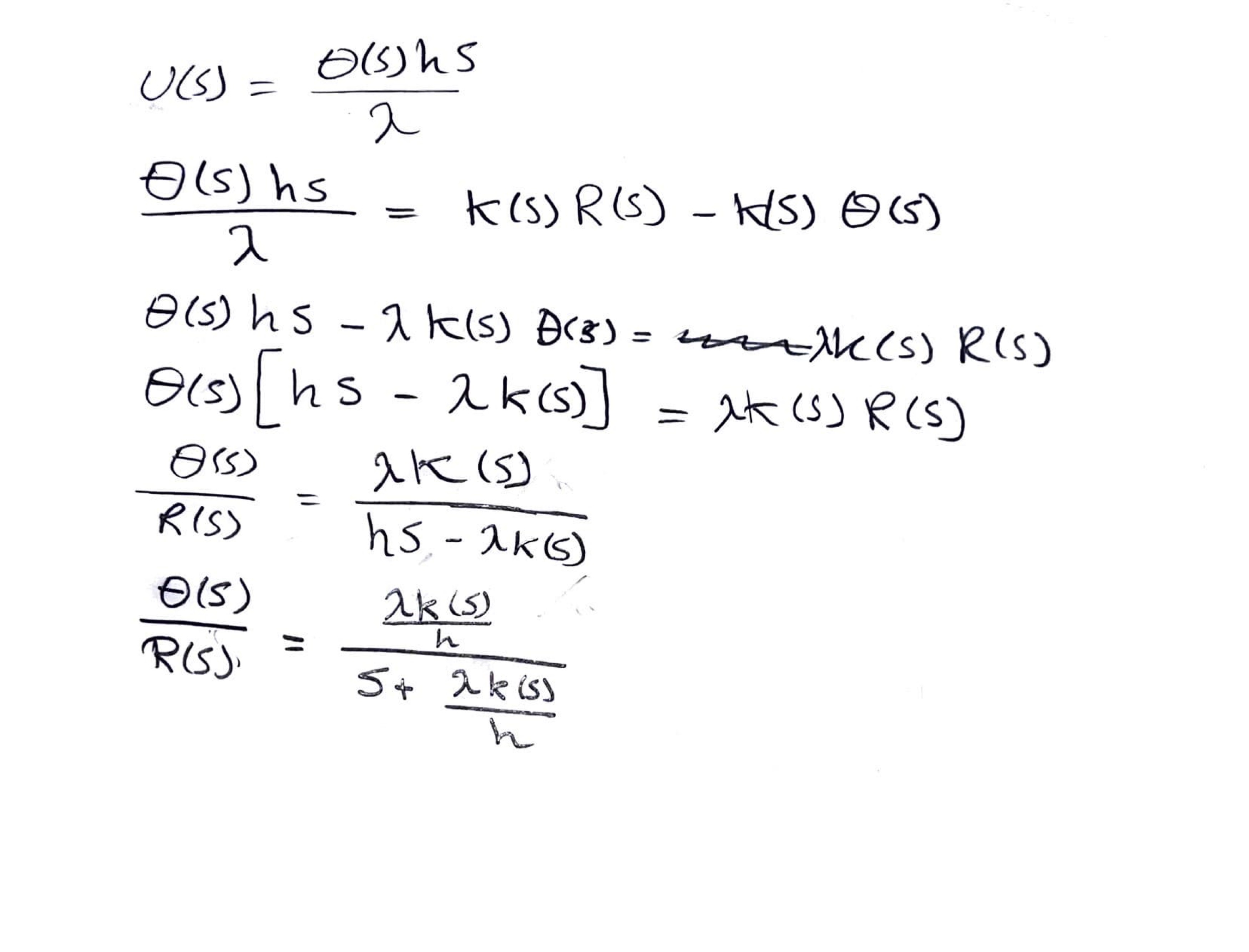
Mathematical Model
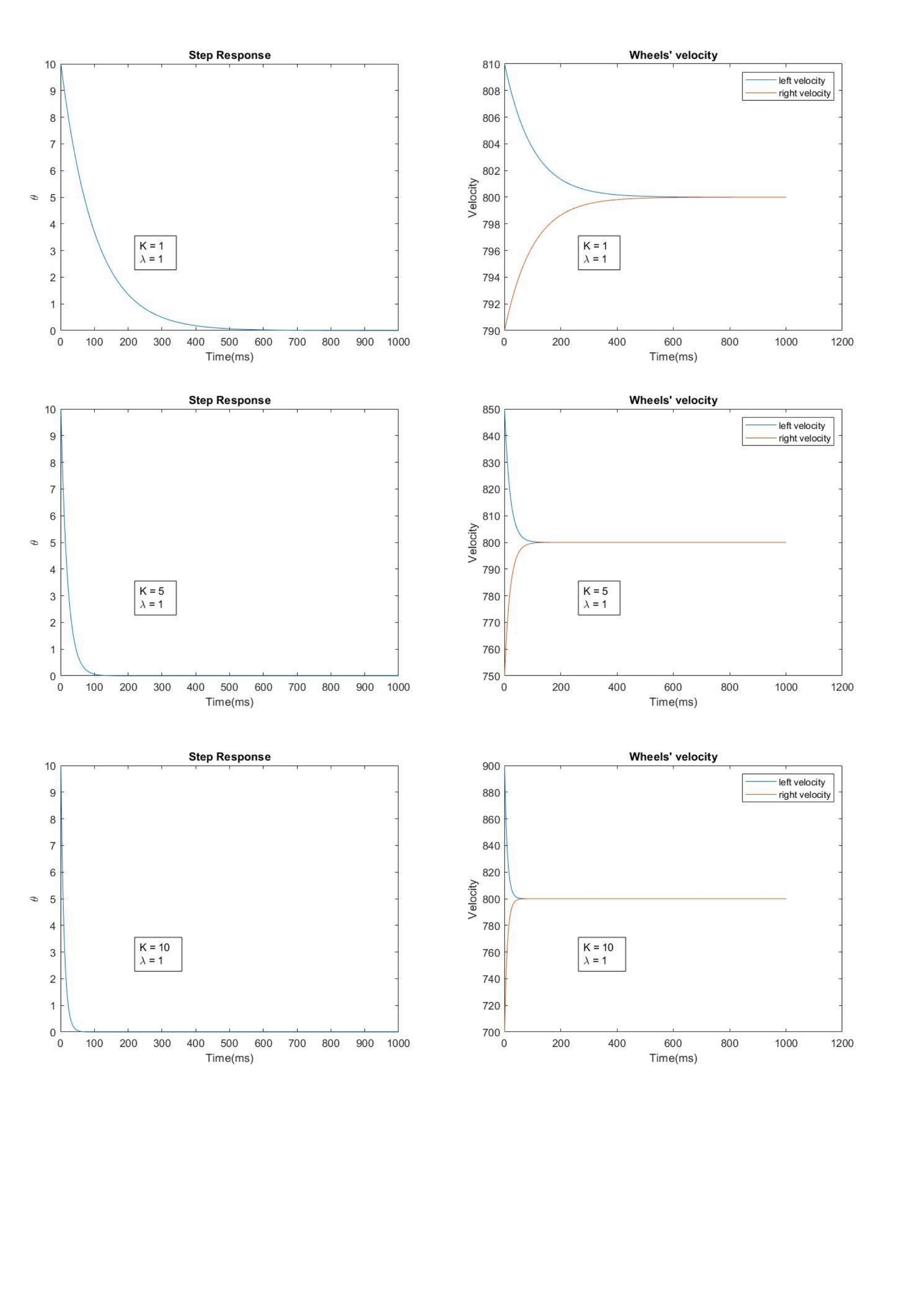
Matlab results
I used the mathematical model transfer function and analysed the step response, as shown in the picture. The main goal was to obtain a value of the closed-loop controller gain which will allow the left and right wheels to work ideally.
This was programmed in C using a PIC18f2221 microcontroller and Spark-fun Line follower array sensor as a guiding input sensor.